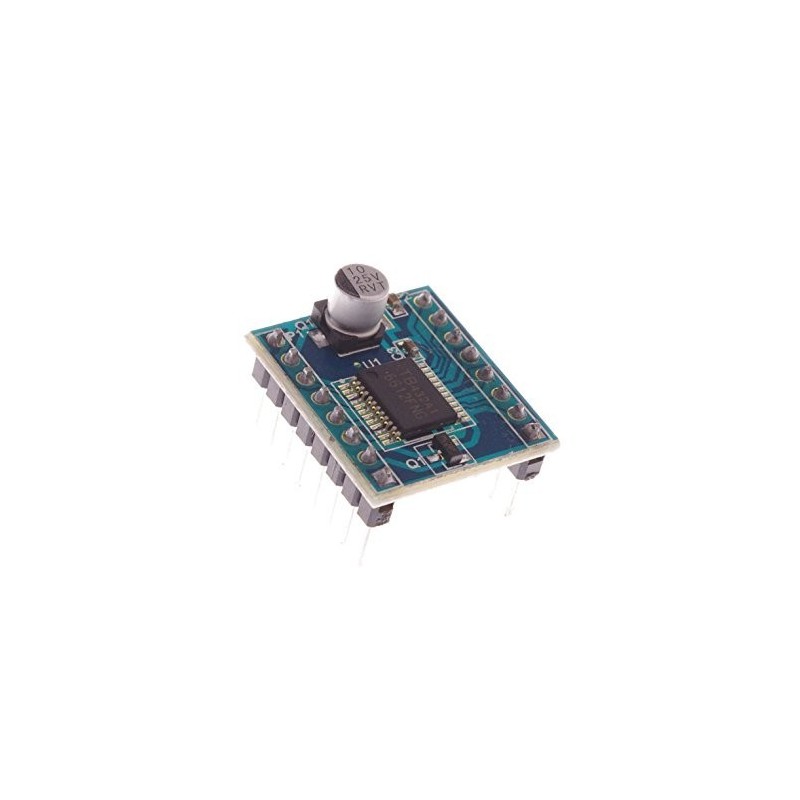

Module de pilote de moteur double pour Arduino STM32,
réplique de bras L298N,
 Garanties sécurité
Garanties sécurité
(à modifier dans le module "Réassurance")
 Politique de livraison
Politique de livraison
(à modifier dans le module "Réassurance")
 Politique retours
Politique retours
(à modifier dans le module "Réassurance")
Par rapport au L298N traditionnel, l'efficacité de ce module est beaucoup plus élevée et la taille est également considérablement réduite. Dans la plage nominale, la puce ne chauffe fondamentalement pas, nous recommandons donc à des amis ayant un certain degré de capacité pratique de l'utiliser. Soyez prudent lors du câblage. Polarité positive et négative.
L'utilisation de TB6612:
TB6612 est à double entraînement, c'est-à-dire qu'il peut entraîner deux moteurs
Voici les ports IO qui contrôlent les deux moteurs
Le port STBY est connecté au port IO du micro-ordinateur monopuce. Le moteur est dégagé et tout arrêté, réglé sur 1 pour contrôler la rotation avant et arrière via AIN1 AIN2, BIN1, BIN2
VM connecté à une alimentation électrique de 12V
VCC se connecte à une alimentation 5V
Je ne dirai pas grand-chose sur GND
Conduire 1 voie
PWMA est connecté au port PWM du MCU
Table de vérité:
AIN1 0 0 1
AIN2 0 1 0
Arrêt en marche arrière
A01
AO2 est connecté aux deux pieds du moteur 1
Entraînement 2 voies
Le PWMB est connecté au port PWM du MCU
Table de vérité:
BIN1 0 0 1
BIN2 0 1 0
Arrêt en marche arrière
B01
BO2 est connecté aux deux pieds du moteur
Module de pilote de moteur double pour Arduino STM32,
réplique de bras L298N,